|
|
Shivashankar
B. Nair Professor, |
|
||
|
|
Phone: +91-361- 2582356 Fax: +91-361- 2692787, 2690762 Email: s b n a i
r A T i i t g D
O T e r n e t D O T i n
|
|||
|
|
Cyber-Physical Systems/Internet of Things, Intelligent Mobile Agents, Bio-inspired Systems, Networked & Emotional Robotics, Nature-inspired Language processing, Artificial Immune Systems, Genetic Algorithms, Fuzzy Systems. |
|
||
|
Educational
Qualifications: |
Ph.D. (Robot-Robot-Human Interactions in Real Time Environments) 1998 Amravati University, Amravati (India) M.E. (Electronics)* 1988 Amravati University, Amravati (India) M.Sc. (Applied Electronics)* 1985 Amravati University, Amravati (India) B.A. Additional (English Literature) 1983 Nagpur University, Nagpur (India) B.Sc. (Physics, Maths, Chemistry) 1982 Nagpur University, Nagpur (India) * First in the University |
Click here to
preview the Visit the Companion site of the book Click here to
download a trial version of Check out the Mobile Agent Platform at our Robotics Site |
||
|
Experience: 1998-To date at IIT-G Past:
Administrative: |
2012- Professor
2012-2014 Professor & Head 2004-2012 Associate Professor 2008-2009 Visiting Professor (South
Korean Brain Pool), 1998-2004 Assistant Professor Dept. of Computer Science & Engineering, Indian Institute of Technology Guwahati Duties:Teaching
Graduate and Masters level courses 2006-2007 - GATE-2007 Chairman, IIT Guwahati |
Visit the Robotics
Lab.
__________________________ iRobIN
|
||
|
Pre IIT-G Experience: 1985 - 1986
|
Lecturer S.S.G.M.College of Engineering Shegaon, Maharashtra (India) Teaching at the Under Graduate Level Senior Lecturer Amravati University Amravati, Maharashtra (India) Teaching and Conducting Research at the Post Graduate Depts. of Applied Electronics and Computer Science; Guiding Masters' degree projects. Visiting Faculty Government College of Engineering, Amravati, Maharashtra (India) Teaching and Guiding projects; Aiding in setting up laboratories |
Links: AI Projects@IITG (Intranet Only)
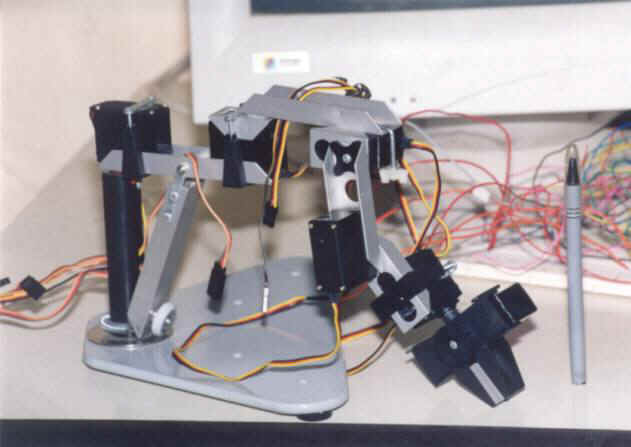
The Robix Rascal Robot - trying to learn to avoid an obstacle (a pen) using a blind approach coupled with neural networks. Autonomous Obstacle Avoidance: Unsupervising Supervised Learning
|
||
|
|
|
|